机器人遥控控制
键盘遥控
打开MobaXterm或者Vscode进行SSH连接,SSH连接成功后,输入以下指令操作OriginMan:
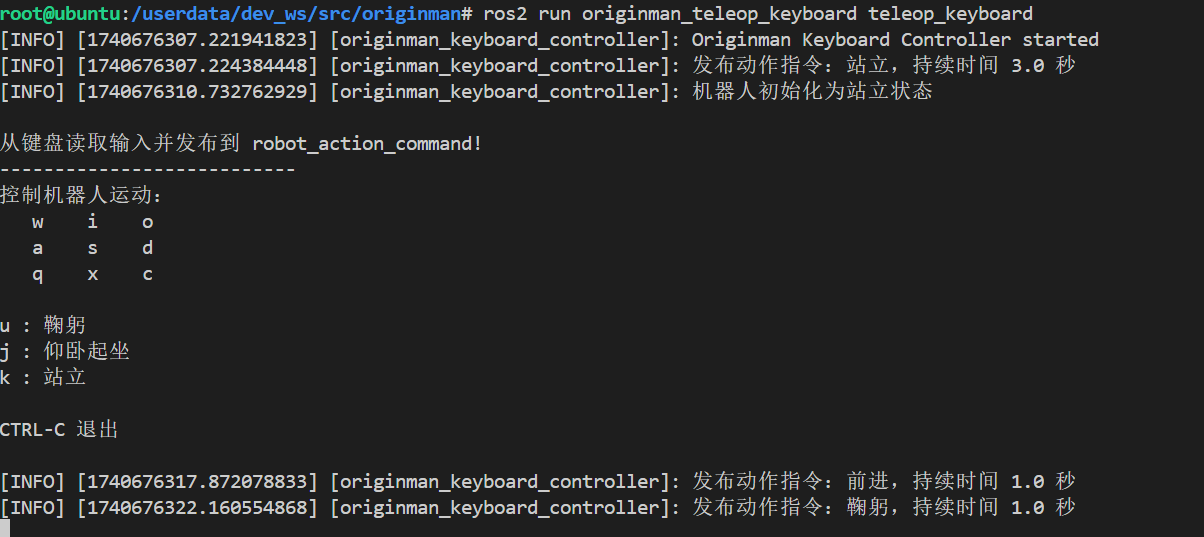
启动后,OriginMan将会进行各个舵机上电使能,并运行站立动作,然后大家可以根据终端显示的log信息键盘控制机器人进行运动。
机器人动作按键映射表
| 键盘按键 | 动作 |
|---|---|
w |
前进 |
s |
后退 |
a |
左转 |
d |
右转 |
i |
双臂伸展 |
o |
开怀大笑 |
q |
挥手 |
x |
搓手 |
c |
仰卧起坐 |
u |
鞠躬 |
j |
仰卧起坐 |
k |
站立 |
手柄遥控
手柄连接
首先需要将套件中的usb组件插入OriginMan主控的USB接口上,然后给手柄装上电池。
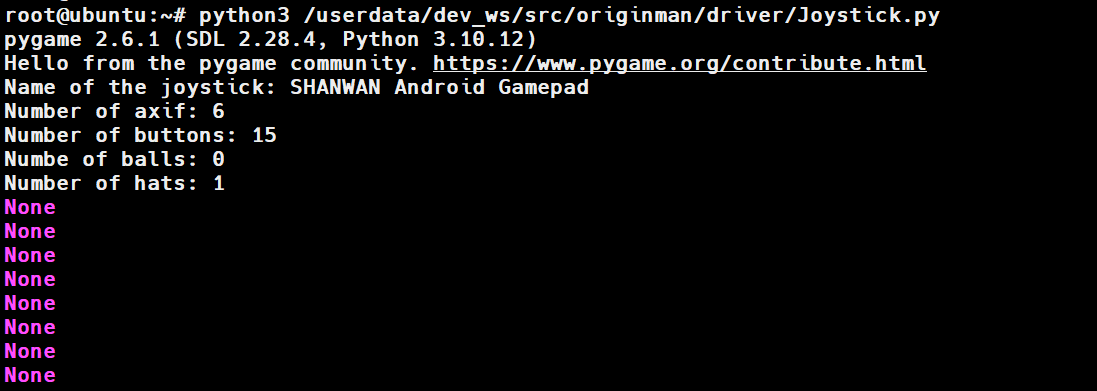
连接完成后,可以在终端输入以下指令确认系统是否成功识别:

如识别到“js0”设备,则说明手柄识别成功。
遥控运动
打开一个终端运行以下指令:
按键动作映射说明
| 按键名称 | 对应动作 |
|---|---|
| PSB_R1 | right_kick |
| PSB_R2 | turn_right |
| PSB_L1 | left_kick |
| PSB_L2 | turn_left |
| PSB_SQUARE | left_shot_fast |
| PSB_CIRCLE | right_shot_fast |
| PSB_TRIANGLE | wave |
| PSB_CROSS | bow |
| 左摇杆 X 轴 < -0.5 | left_move_fast |
| 左摇杆 X 轴 > 0.5 | right_move_fast |
| 左摇杆 Y 轴 < -0.5 且 PSB_L3 未按下 | go_forward |
| 左摇杆 Y 轴 > 0.5 且 PSB_L3 未按下 | back_fast |
| PSB_START | stand_slow |
接下来便可以按照上述对应按键进行动作控制了。
