OriginMan智能人形机器人开源套件
最新消息:OriginMan V1.1.3发布!引入大模型视觉识别功能,支持多项动作指令和运动控制!并修复了部分已知问题。点击了解详情
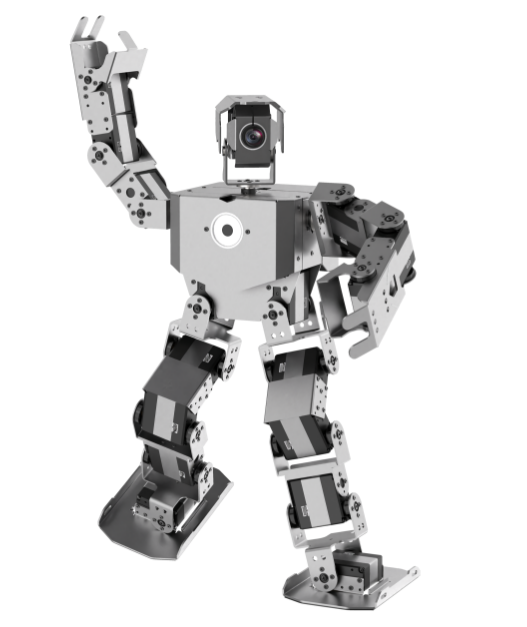
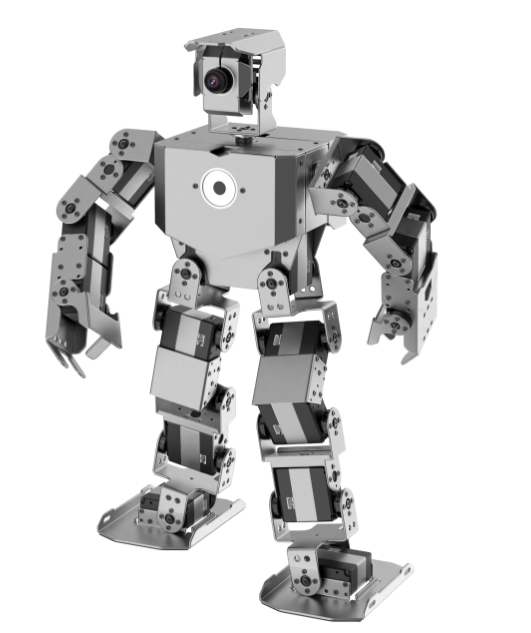
OriginMan
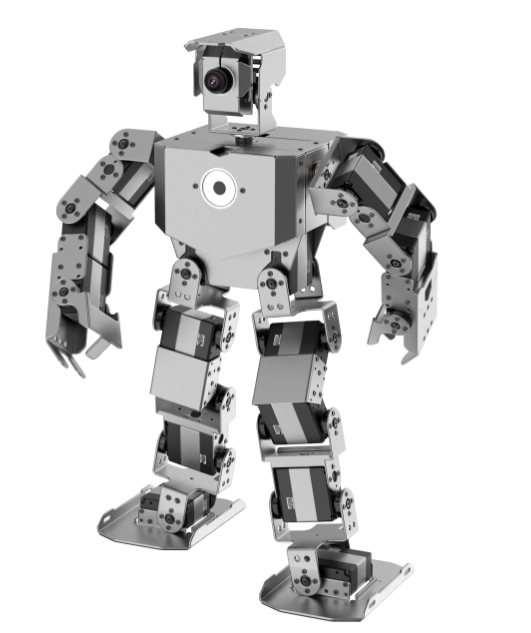
OriginMan是一款面向未来的智能桌面人形机器人,同时也是首个全开源的ROS2桌面人形机器人开源项目,旨在让每一位参与者享受机器人开发的乐趣。
开源共建
 "开放共享,智创未来"是OriginMan的进化哲学,期待与全球开发者共建机器人未来。
"开放共享,智创未来"是OriginMan的进化哲学,期待与全球开发者共建机器人未来。
▶ 开源生态
提供主控系统源码、大脑小脑通信协议以及动作编辑软件源码,助力每位开发者轻松打造专属的“智能大脑”,释放独特创意,开发多样化应用。
持续迭代 ◀
 无论真理多么深远,每一次小小的进步都值得欣喜。依托强大的社区支持,OriginMan和它的开发者不断前行,软硬件持续迭代,版本周期更新,让我们一起成长壮大。
无论真理多么深远,每一次小小的进步都值得欣喜。依托强大的社区支持,OriginMan和它的开发者不断前行,软硬件持续迭代,版本周期更新,让我们一起成长壮大。
▶ 畅享AI开发
 OriginMan出厂即支持诸多AI功能,并且提供DeepSeek、Qwen等模型API及使用案例,让你的机器人开发之旅有更多可能。
OriginMan出厂即支持诸多AI功能,并且提供DeepSeek、Qwen等模型API及使用案例,让你的机器人开发之旅有更多可能。
内容齐全 ◀
 OriginMan不仅是一个开源套件,更是你的机器人朋友。硬件、软件、图文教程、视频资源、论坛支持一应俱全,丰富的软硬件支持助力你快速成长。
OriginMan不仅是一个开源套件,更是你的机器人朋友。硬件、软件、图文教程、视频资源、论坛支持一应俱全,丰富的软硬件支持助力你快速成长。
智能进化平台
OriginMan不仅是一个硬件开发平台,更是一个不断进化的智能算法平台,你可以拓展无限可能。
▶ 认知核心
 OriginMan原生搭载地瓜机器人开发板——RDK X5,10TOPS算力支持实时视觉推理、自然语言处理。预装大模型交互系统,可实现多轮对话理解、AI智能互动等智能联动,真正体验开发“智能”机器人。
OriginMan原生搭载地瓜机器人开发板——RDK X5,10TOPS算力支持实时视觉推理、自然语言处理。预装大模型交互系统,可实现多轮对话理解、AI智能互动等智能联动,真正体验开发“智能”机器人。
应用丰富 ◀
 OriginMan以ROS2及TogetheROS™.Bot(地瓜机器人深入优化的ROS开源机器人操作系统)作为机器人软件系统,兼容ROS生态中的众多应用功能,即装即用;原装应用丰富,快速开始人体模仿学习、视觉巡线、AI语音交互等应用开发。
OriginMan以ROS2及TogetheROS™.Bot(地瓜机器人深入优化的ROS开源机器人操作系统)作为机器人软件系统,兼容ROS生态中的众多应用功能,即装即用;原装应用丰富,快速开始人体模仿学习、视觉巡线、AI语音交互等应用开发。
始于初心
每个机械关节都承载着对智能体的想象,每次代码提交都在描绘人机共生的未来。
携手同行 ◀
 这里没有孤胆英雄,只有携手同行的探索者。无论您是首次接触机器人,还是资深开发者,都能在社区找到志同道合的伙伴。
这里没有孤胆英雄,只有携手同行的探索者。无论您是首次接触机器人,还是资深开发者,都能在社区找到志同道合的伙伴。技术规格
| 主要配置项 | 参数说明 | 详细规格说明 |
|---|---|---|
| 主控系统 | RDK X5 主控平台 | • CPU:八核ARM Cortex-A55@1.5GHz,支持64位指令集 • GPU:32GFLOPS图形处理单元 • BPU:1XBayes-e@10TOPS神经网络处理器 • 内存:8GB LPDDR4 高速运行内存 • 存储:32GB 高速闪存 |
| 扩展控制 | MM32F103CBT6 控制器 | • 主频:96MHz高速处理器 • Flash:64KB程序存储空间 • RAM:20KB数据运行空间 • IMU:MPU6050六轴传感器,支持姿态检测 |
| 执行系统 | 高性能舵机配置 | 躯干舵机HTD-30H • 扭矩:30KG.cm@12.6V大功率输出 • 精度:0.3°高精度控制 • 角度:0°-240°大范围转动 • 通信:总线控制方式 头部舵机LFD-01M • 扭矩:1.8KG.cm@6V精确控制 • 角度:0°-180°灵活转动 • 特点:防堵转设计,金属齿轮传动 |
| 自由度分布 | 20自由度配置 | • 头部模块:2DOF×1(水平、俯仰) • 手臂模块:2DOF×2(肩部)+ 1DOF×2(肘部)+ 1DOF×2(手部) • 腿部模块:2DOF×2(髋部)+ 1DOF×2(膝部)+ 2DOF×2(踝部) • 全身协调控制,支持复杂动作编程 |
| 感知系统 | 多模态传感器集成 | • 视觉系统:500万像素摄像头,120°超广角视场 • 显示模块:128×64 SSD1306 OLED显示屏 • 灯光系统:6×WS2812B RGB全彩灯环 • 音频系统:3W/4Ω高保真扬声器 • 拾音系统:MEMS数字输出麦克风阵列 |
| 电源系统 | 智能锂电池供电 | • 电池规格:11.1V 2500mAh高能量密度锂电池 • 放电性能:10C持续放电倍率 • 续航能力:≥3小时标准工作时间 • 充电系统:≤2小时快速充电,支持边充边用 |
| 通信接口 | 丰富接口支持 | • USB接口:1×Type-C(数据)+ 4×USB3.0(扩展) • 无线通信:双频WiFi6 + 蓝牙5.4 • 调试接口:Micro USB串口 • 扩展接口:预留I2C、GPIO等功能接口 |
| 机械规格 | 整机工程参数 | • 机身尺寸:373mm(高)×186mm(宽)×106mm(厚) • 整机重量:2.05KG(含电池) • 负载能力:最大载重500g • 运动性能:最大步速16cm/s |
| 操作系统 | 软件开发环境 | • 操作系统:Ubuntu 22.04 LTS • 机器人框架:ROS2 Humble • 开发平台:TogetheROS.Bot |
| 开发支持 | 全栈开发能力 | • 编程语言:Python/C/C++/JavaScript多语言支持 • 移动控制:iOS/Android APP远程操作 • 开发工具:可视化动作编辑器,仿真环境 • 二次开发:提供完整API接口文档 |
参与贡献
我们坚信,人形机器人的未来应由开发者共同塑造,诚挚邀请各位开发者可以参与到OriginMan项目当中来,参与的方式和形式有很多种:
提供反馈
贡献代码
- 在使用OriginMan套件的过程中,如对原生代码有优化、增加等修改,欢迎在代码仓库中提交Pull Request;
开源传递
-
如果你对OriginMan有兴趣,欢迎点赞该项目的源码仓库,或者分享给身边有需要的开发者;
-
如果基于OriginMan开源项目衍生出更多有意思的功能或者机器人,欢迎在社区板块中与大家分享,优秀的项目我们也会在社区中宣传;
链接汇总
-
开源仓库:
| 名称 | 链接 | 说明 |
|---|---|---|
| originman | https://gitee.com/guyuehome/originman | originman机器人功能包仓库 |
-
论坛交流:https://www.guyuehome.com/interlocution?id=1826932316801544194
-
地瓜机器人开发者社区:https://developer.d-robotics.cc/

