Code Development and Compilation Methods
OriginMan development fully follows ROS2 development methods. Here's a brief introduction to common package operations. For detailed ROS2 development principles, please refer to ROS2 Getting Started Tutorial.
Workspace
In ROS robot development, when we develop code for certain robot functions, all the code, parameters, scripts, and other files need to be managed in a folder, which is called a workspace in the ROS system.
The official OriginMan image has already created a workspace located in the /userdata folder, named dev_ws, which is called the workspace root directory. It contains five subfolders:

- src, source space, where future code and scripts need to be manually placed;
- build, build space, stores intermediate files generated during compilation;
- install, install space, stores compiled executables and scripts;
- log, log space, stores various warnings, errors, and information logs during compilation and runtime.
- config, configuration files, stores model configuration files for human tracking and gesture recognition applications (not required for ROS2 workspace).
Among these five spaces, most of our operations are performed in src, and after successful compilation, we execute the compilation results in install.
Packages
The OriginMan robot packages are located in the src folder under the /userdata/dev_ws workspace. Here are the package descriptions:
| Package Name | Description |
|---|---|
| originman_airiltag_detect | Package for detecting and locating AirTags |
| originman_kick_ball | Package for executing kicking actions |
| originman_teleop_keyboard | Package for keyboard teleoperation control |
| originman_audio_control | Package for audio-controlled robot actions |
| originman_line_follower | Package for visual line following |
| originman_transport_lab | Package for transport experiment functions |
| originman_color_detect | Package for color detection and recognition |
| originman_llm_chat | Package for LLM chat interaction |
| originman_action_imitation | Package for human action imitation |
| originman_demo | ROS2 version robot driver demo package |
| originman_pydemo | Python-implemented robot demonstration examples |
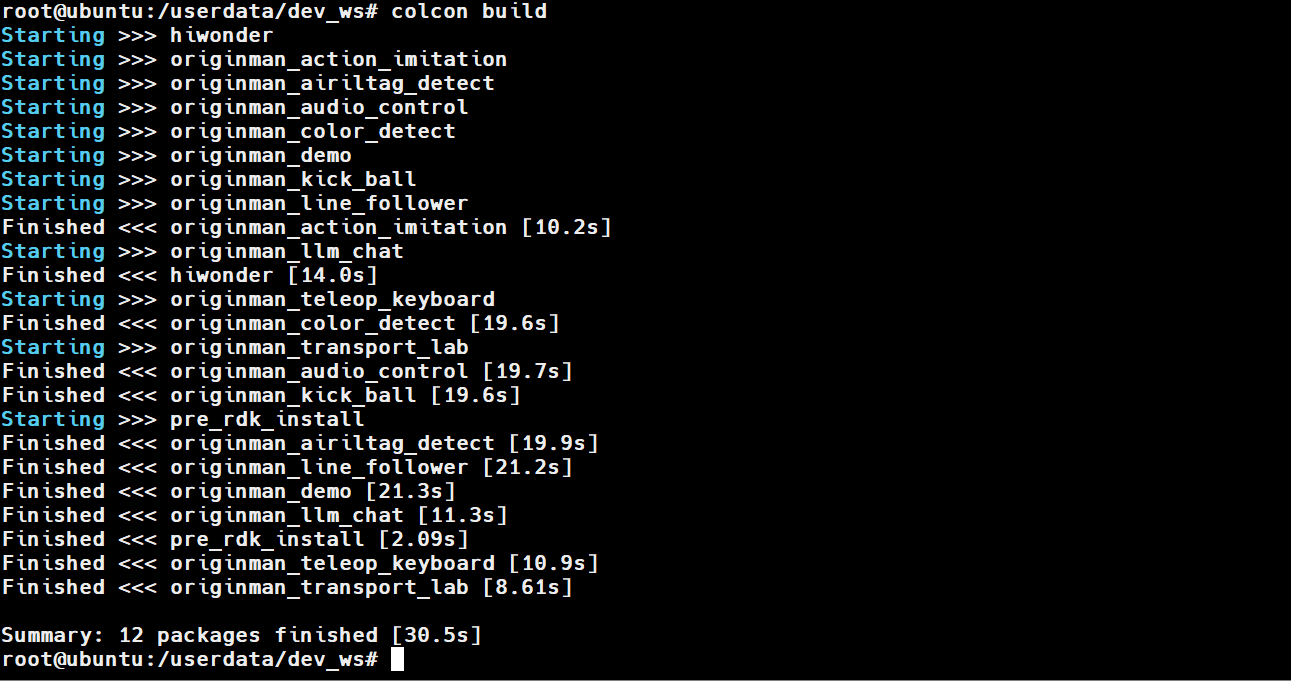
Compiling Code
After modifying package code or configuration files, use the following commands to compile the workspace. If there are missing dependencies or code errors, the compilation process will show errors; otherwise, the compilation should proceed without any errors:
Setting Environment Variables
After successful compilation, to allow the system to find our packages and executables, we need to set environment variables:
$ source /userdata/dev_ws/install/local_setup.bash # Only effective in current terminal
$ echo " source /userdata/dev_ws/install/local_setup.bash" >> ~/.bashrc # Effective in all terminals, only needs to be run once
Hint
The environment variables have already been configured in the .bashrc configuration file in the OriginMan image, no further configuration is needed.
