Human Tracking
Imagine how wonderful it would be to have an intelligent humanoid robot accompany you while shopping, carrying your bags! This section will introduce how to implement human following functionality using OriginMan.
Running the Example
After successfully connecting via SSH, enter the following command to operate OriginMan:
After launching, you will see the following interface:
Now open another terminal and enter the following command:
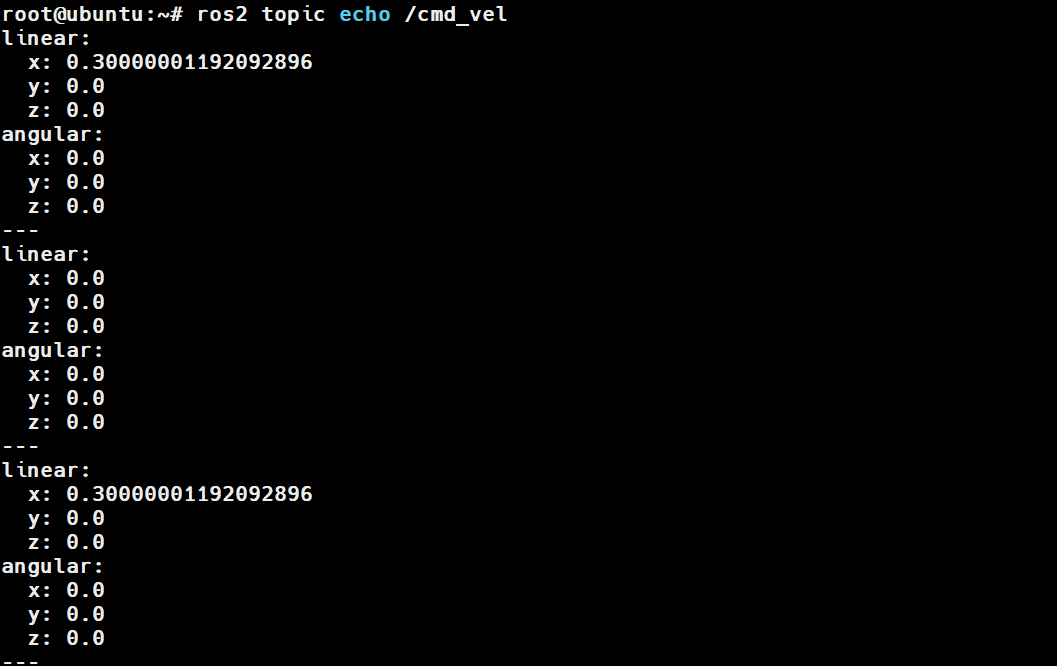
cmd_vel represents the actual speed at which the robot will run!
linear.x:0.30000001192092896 means moving forward at a speed of 0.3m/s.
Now we need to convert this speed into our actions.
Press Ctrl+C in the current terminal and run the following command:
At this point, you can see the robot start moving and approaching you. After reaching a certain distance, it will even wave at you.
root@ubuntu:~# ros2 run originman_demo cmdvel_to_action_node
[INFO] [1740723064.148182250] [cmd_vel_to_action_node]: CmdVel to action node started, executing initial standing action...
[INFO] [1740723064.655577271] [cmd_vel_to_action_node]: Executing action group: stand
[INFO] [1740723069.663428866] [cmd_vel_to_action_node]: CmdVel to action node ready, waiting for /cmd_vel messages...
[INFO] [1740723069.668012120] [cmd_vel_to_action_node]: Received velocity command: linear_x=0.5, angular_z=0.0, executing action: forward
[INFO] [1740723070.780538562] [cmd_vel_to_action_node]: Executing action group: go_forward
[INFO] [1740723089.300148717] [cmd_vel_to_action_node]: Received velocity command: linear_x=0.0, angular_z=0.0, executing action: wave
[INFO] [1740723093.284371927] [cmd_vel_to_action_node]: Executing action group: wave
