OriginMan Intelligent Humanoid Robot Open Source Kit
Latest News:Announcing OriginMan V1.1.3! Introducing large model visual recognition with support for multiple action commands and motion control! Fixed some known issues. Click for details
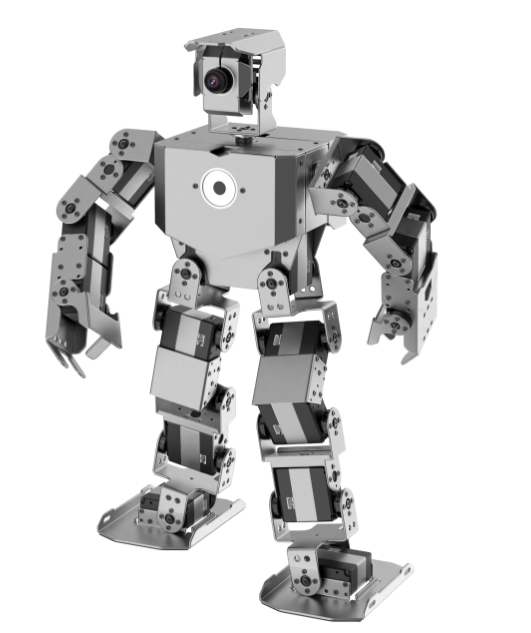
OriginMan
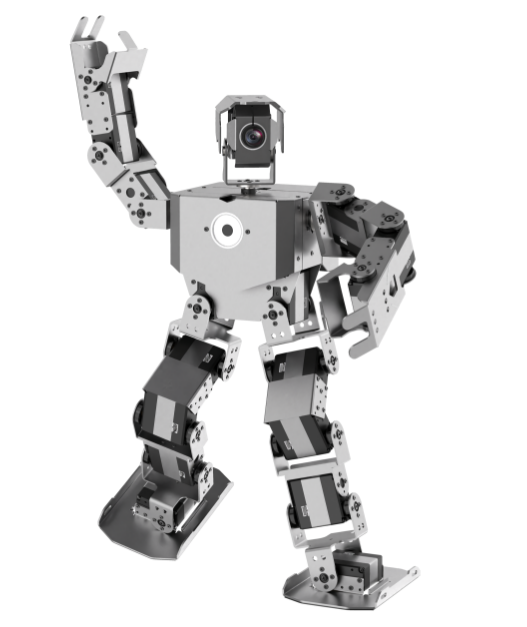
OriginMan is a future-oriented intelligent desktop humanoid robot and the first fully open-source ROS2 desktop humanoid robot project, aimed at letting every participant enjoy the fun of robot development.
Open Source Co-creation
"Open Source is Power" is the core spirit of the ORIGINBOT product series. "Open Sharing, Smart Future" is OriginMan's evolutionary philosophy, looking forward to building the future of robotics with developers worldwide.
▶ Open Source Ecosystem
Providing source code for the control system, brain-cerebellum communication protocols, and motion editing software, helping every developer easily create their own "intelligent brain," unleash unique creativity, and develop diverse applications.
Continuous Iteration ◀
 Fear not the endless pursuit of truth, for each step forward brings its own joy. Backed by strong community support, both OriginMan and its developers continue to progress, with ongoing hardware and software iterations and regular version updates, letting us grow stronger together.
Fear not the endless pursuit of truth, for each step forward brings its own joy. Backed by strong community support, both OriginMan and its developers continue to progress, with ongoing hardware and software iterations and regular version updates, letting us grow stronger together.
▶ Enjoy AI Development
 OriginMan comes with many AI capabilities out of the box and provides APIs and use cases for models like DeepSeek and Qwen, offering more possibilities for your robot development journey.
OriginMan comes with many AI capabilities out of the box and provides APIs and use cases for models like DeepSeek and Qwen, offering more possibilities for your robot development journey.
Comprehensive Content ◀
 OriginMan is not just an open-source kit but your robotic friend. Complete with hardware, software, tutorials, video resources, and forum support, the rich software and hardware support helps you grow quickly.
OriginMan is not just an open-source kit but your robotic friend. Complete with hardware, software, tutorials, video resources, and forum support, the rich software and hardware support helps you grow quickly.
Intelligent Evolution Platform
OriginMan is not just a hardware development platform but an evolving intelligent algorithm platform with unlimited possibilities.
▶ Cognitive Core
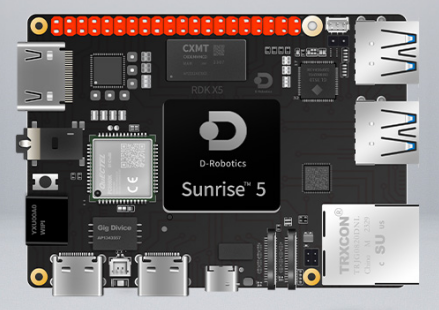 OriginMan natively carries the D-Robotics Development Board—RDK X5, with 10TOPS computing power supporting real-time visual inference and natural language processing. Pre-installed with a large model interaction system, it enables multi-turn dialogue understanding and AI intelligent interaction, offering a true intelligent robot development experience.
OriginMan natively carries the D-Robotics Development Board—RDK X5, with 10TOPS computing power supporting real-time visual inference and natural language processing. Pre-installed with a large model interaction system, it enables multi-turn dialogue understanding and AI intelligent interaction, offering a true intelligent robot development experience.
Rich Applications ◀
 OriginMan uses ROS2 and TogetheROS™.Bot (D-Robotics's deeply optimized ROS open-source robot operating system) as its robot software system, compatible with many applications in the ROS ecosystem, ready to use out of the box. Rich built-in applications allow quick start with human imitation learning, visual line following, AI voice interaction, and other application development.
OriginMan uses ROS2 and TogetheROS™.Bot (D-Robotics's deeply optimized ROS open-source robot operating system) as its robot software system, compatible with many applications in the ROS ecosystem, ready to use out of the box. Rich built-in applications allow quick start with human imitation learning, visual line following, AI voice interaction, and other application development.
Starting with Purpose
Each mechanical joint carries the imagination of intelligent beings, and each code commit sketches the future of human-machine symbiosis.
Walking Together ◀
 Here there are no lone heroes, only explorers walking together. Whether you're new to robotics or an experienced developer, you'll find like-minded partners in the community.
Here there are no lone heroes, only explorers walking together. Whether you're new to robotics or an experienced developer, you'll find like-minded partners in the community.Start Humanoid Robot Development
Technical Specifications
| Main Configuration | Parameters | Detailed Specifications |
|---|---|---|
| Main Control System | RDK X5 Control Platform | • CPU: Octa-core ARM Cortex-A55@1.5GHz, supports 64-bit instruction set • GPU: 32GFLOPS graphics processing unit • BPU: 1XBayes-e@10TOPS neural network processor • Memory: 8GB LPDDR4 high-speed RAM • Storage: 32GB high-speed flash storage |
| Extension Control | MM32F103CBT6 Controller | • Frequency: 96MHz high-speed processor • Flash: 64KB program storage space • RAM: 20KB data running space • IMU: MPU6050 six-axis sensor, supports posture detection |
| Execution System | High-performance Servo Configuration | Torso Servo HTD-30H • Torque: 30KG.cm@12.6V high-power output • Precision: 0.3° high-precision control • Angle: 0°-240° wide-range rotation • Communication: Bus control mode Head Servo LFD-01M • Torque: 1.8KG.cm@6V precise control • Angle: 0°-180° flexible rotation • Features: Anti-stall design, metal gear transmission |
| Degrees of Freedom | 20 DOF Configuration | • Head Module: 2DOF×1 (horizontal, pitch) • Arm Module: 2DOF×2 (shoulder) + 1DOF×2 (elbow) + 1DOF×2 (hand) • Leg Module: 2DOF×2 (hip) + 1DOF×2 (knee) + 2DOF×2 (ankle) • Full-body coordinated control, supports complex motion programming |
| Perception System | Multi-modal Sensor Integration | • Vision System: 5MP camera, 120° ultra-wide angle view • Display Module: 128×64 SSD1306 OLED display • Lighting System: 6×WS2812B RGB full-color light ring • Audio System: 3W/4Ω high-fidelity speaker • Sound Pickup: MEMS digital output microphone array |
| Power System | Smart Lithium Battery Power | • Battery Specs: 11.1V 2500mAh high energy density lithium battery • Discharge Performance: 10C continuous discharge rate • Battery Life: ≥3 hours standard working time • Charging System: ≤2 hours fast charging, supports charging while in use |
| Communication Interfaces | Rich Interface Support | • USB Ports: 1×Type-C (data) + 4×USB3.0 (expansion) • Wireless Communication: Dual-band WiFi6 + Bluetooth 5.4 • Debug Interface: Micro USB serial port • Expansion Ports: Reserved I2C, GPIO, and other functional interfaces |
| Mechanical Specifications | Machine Engineering Parameters | • Body Dimensions: 373mm (height) × 186mm (width) × 106mm (depth) • Total Weight: 2.05KG (including battery) • Load Capacity: Maximum load 500g • Motion Performance: Maximum step speed 16cm/s |
| Operating System | Software Development Environment | • OS: Ubuntu 22.04 LTS • Robot Framework: ROS2 Humble • Development Platform: TogetheROS.Bot |
| Development Support | Full-stack Development Capabilities | • Programming Languages: Python/C/C++/JavaScript multi-language support • Mobile Control: iOS/Android APP remote operation • Development Tools: Visual motion editor, simulation environment • Secondary Development: Complete API documentation provided |
Contributing
We believe that the future of humanoid robots should be shaped by developers together. We sincerely invite developers to participate in the OriginMan project in various ways:
Provide Feedback
-
If you have any questions or suggestions while using the OriginMan kit, feel free to discuss them in the Guyuehome Community Section;
-
If you find any bugs while using OriginMan software, please submit an Issue in the code repository;
Contribute Code
- If you have optimizations or additions to the original code while using the OriginMan kit, please submit a Pull Request in the code repository;
Open Source Sharing
-
If you're interested in OriginMan, please star the project's source code repository or share it with developers who might need it;
-
If you develop interesting features or robots based on the OriginMan open-source project, feel free to share them in the community section. Outstanding projects will be promoted in the community;
Link Summary
-
Community Website: https://originman.guyuehome.com/
-
Open Source Repositories:
| Name | Link | Description |
|---|---|---|
| originman | https://gitee.com/guyuehome/originman | OriginMan robot function package repository |
-
Forum Discussion: https://www.guyuehome.com/interlocution?id=1826932316801544194
-
D-Robotics Community: https://developer.d-robotics.cc/
-
Purchase Link: https://zyesr.xetslk.com/s/18ux4J

